![]()
![]()
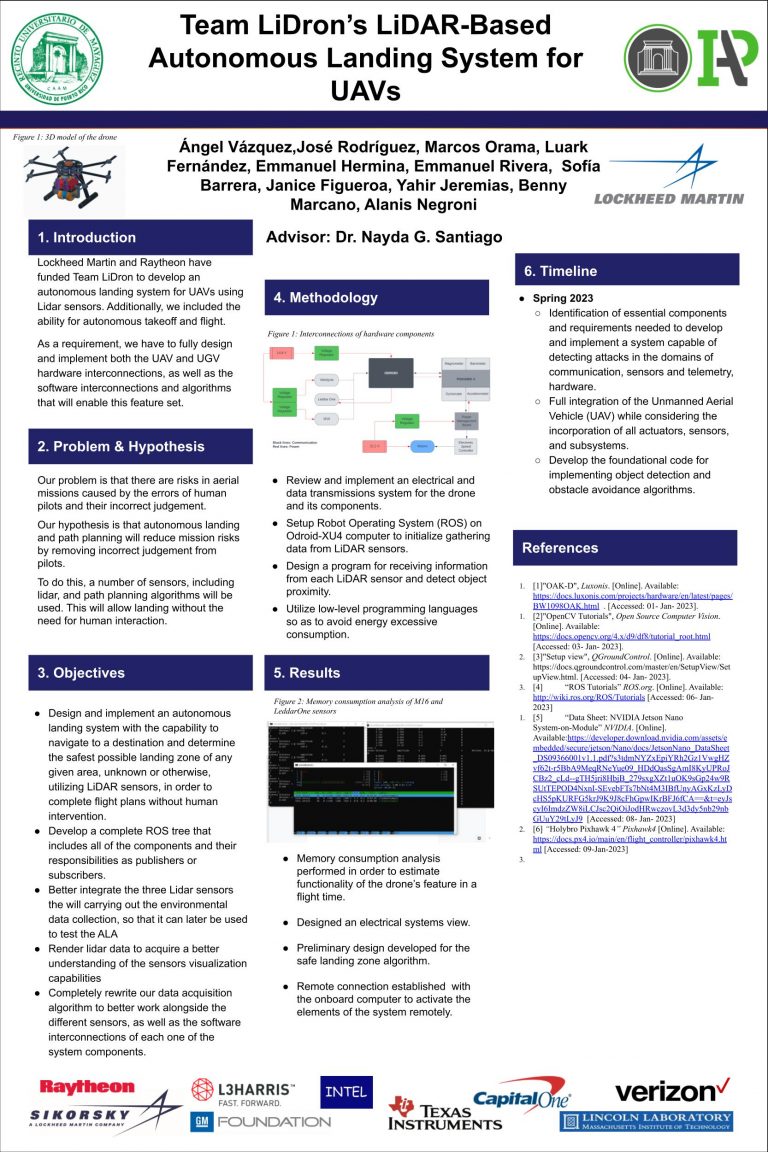
Lockheed Martin and Raytheon have funded Team LiDron to develop an autonomous landing system for UAVs using Lidar sensors. Additionally, we included the ability for autonomous takeoff and flight. As a requirement, we have to fully design and implement both the UAV and UGV hardware interconnections, as well as the software interconnections and algorithms that will enable this feature set.
![]()
![]()
-

- Alanis Negroni – PM

-

- Luark Fernández

-

- Ariana Rodríguez

-

- Gabriel Concepción
-

- Axel Rivera

-

- Sebastián Franceschini
-

- José K. Rosado

-

- Manuel Fuertes
-

- Juan G. Iranzo – Co PM

-

- Janice Figueroa

-

- Joel Alvarado

-

- John R. Santiago
-

- Alvin Badillo
-

- Alejandro González

-

- Ale Pagán